The 8-puzzle is a square board with 9 positions, filled by 8 numbered tiles and one gap. At any point, a tile adjacent to the gap can be moved into the gap, creating a new gap position. In other words the gap can be swapped with an adjacent (horizontally and vertically) tile. The objective in the game is to begin with an arbitrary configuration of tiles, and move them so as to get the numbered tiles arranged in ascending order either running around the perimeter of the board or ordered from left to right, with 1 in the top left-hand position.
I was wondering what approach will be efficient to solve this problem?
I will just attempt to rewrite the previous answer with more details on why it is optimal.
The A* algorithm taken directly from wikipedia is
So let me fill in all the details here.
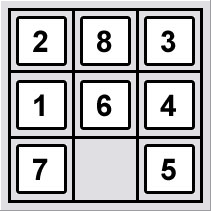
heuristic_estimate_of_distanceis the function Σ d(xi) where d(.) is the Manhattan distance of each square xi from its goal state.So the setup
would have a
heuristic_estimate_of_distanceof 1+2+1=4 since each of 8,5 are one away from their goal position with d(.)=1 and 7 is 2 away from its goal state with d(7)=2.The set of nodes that the A* searches over is defined to be the starting position followed by all possible legal positions. That is lets say the starting position
xis as above:then the function
neighbor_nodes(x)produces the 2 possible legal moves:The function
dist_between(x,y)is defined as the number of square moves that took place to transition from statextoy. This is mostly going to be equal to 1 in A* always for the purposes of your algorithm.closedsetandopensetare both specific to the A* algorithm and can be implemented using standard data structures (priority queues I believe.)came_fromis a data structure usedto reconstruct the solution found using the function
reconstruct_pathwho’s details can be found on wikipedia. If you do not wish to remember the solution you do not need to implement this.Last, I will address the issue of optimality. Consider the excerpt from the A* wikipedia article:
“If the heuristic function h is admissible, meaning that it never overestimates the actual minimal cost of reaching the goal, then A* is itself admissible (or optimal) if we do not use a closed set. If a closed set is used, then h must also be monotonic (or consistent) for A* to be optimal. This means that for any pair of adjacent nodes x and y, where d(x,y) denotes the length of the edge between them, we must have:
h(x) <= d(x,y) +h(y)”
So it suffices to show that our heuristic is admissible and monotonic. For the former (admissibility), note that given any configuration our heuristic (sum of all distances) estimates that each square is not constrained by only legal moves and can move freely towards its goal position, which is clearly an optimistic estimate, hence our heuristic is admissible (or it never over-estimates since reaching a goal position will always take at least as many moves as the heuristic estimates.)
The monotonicity requirement stated in words is:
“The heuristic cost (estimated distance to goal state) of any node must be less than or equal to the cost of transitioning to any adjacent node plus the heuristic cost of that node.”
It is mainly to prevent the possibility of negative cycles, where transitioning to an unrelated node may decrease the distance to the goal node more than the cost of actually making the transition, suggesting a poor heuristic.
To show monotonicity its pretty simple in our case. Any adjacent nodes x,y have d(x,y)=1 by our definition of d. Thus we need to show
h(x) <= h(y) + 1
which is equivalent to
h(x) – h(y) <= 1
which is equivalent to
Σ d(xi) – Σ d(yi) <= 1
which is equivalent to
Σ d(xi) – d(yi) <= 1
We know by our definition of
neighbor_nodes(x)that two neighbour nodes x,y can have at most the position of one square differing, meaning that in our sums the termd(xi) – d(yi) = 0
for all but 1 value of i. Lets say without loss of generality this is true of i=k. Furthermore, we know that for i=k, the node has moved at most one place, so its distance to
a goal state must be at most one more than in the previous state thus:
Σ d(xi) – d(yi) = d(xk) – d(yk) <= 1
showing monotonicity. This shows what needed to be showed, thus proving this algorithm will be optimal (in a big-O notation or asymptotic kind of way.)
Note, that I have shown optimality in terms of big-O notation but there is still lots of room to play in terms of tweaking the heuristic. You can add additional twists to it so that it is a closer estimate of the actual distance to the goal state, however you have to make sure that the heuristic is always an underestimate otherwise you loose optimality!
EDIT MANY MOONS LATER
Reading this over again (much) later, I realized the way I wrote it sort of confounds the meaning of optimality of this algorithm.
There are two distinct meanings of optimality I was trying to get at here:
1) The algorithm produces an optimal solution, that is the best possible solution given the objective criteria.
2) The algorithm expands the least number of state nodes of all possible algorithms using the same heuristic.
The simplest way to understand why you need admissibility and monotonicity of the heuristic to obtain 1) is to view A* as an application of Dijkstra’s shortest path algorithm on a graph where the edge weights are given by the node distance traveled thus far plus the heuristic distance. Without these two properties, we would have negative edges in the graph, thereby negative cycles would be possible and Dijkstra’s shortest path algorithm would no longer return the correct answer! (Construct a simple example of this to convince yourself.)
2) is actually quite confusing to understand. To fully understand the meaning of this, there are a lot of quantifiers on this statement, such as when talking about other algorithms, one refers to
similaralgorithms as A* that expand nodes and search without a-priori information (other than the heuristic.) Obviously, one can construct a trivial counter-example otherwise, such as an oracle or genie that tells you the answer at every step of the way. To understand this statement in depth I highly suggest reading the last paragraph in the History section on Wikipedia as well as looking into all the citations and footnotes in that carefully stated sentence.I hope this clears up any remaining confusion among would-be readers.